
Accurate knowledge of the Shuttle's position is necessary to form the reference frame for geolocation of the Shuttle Laser Altimeter (SLA) observations. In support of SLA-1, unprecedented meter level Shuttle radial orbit accuracy has been achieved from Tracking and Data Relay Satellite System (TDRSS) Doppler observations (the details have been documented in Rowlands et al.). In some cases, these data were combined with Global Positioning System (GPS) pseudorange observations. Traditionally, the Tracking and Data Relay Satellite (TDRS) orbits themselves have been the dominant source of error in Shuttle orbit determination during quiescent attitude periods. A new technique utilizing TOPEX/Poseidon's (T/P) precise orbit knowledge, plus the TDRSS-T/P Doppler tracking, has been developed to significantly reduce the TDRS orbit errors. This approach, along with improved modeling and parameterization, has allowed us to compute precise Shuttle orbits from TDRSS-Shuttle Doppler tracking data. Orbit overlap comparisons indicate these Doppler derived orbits have a meter level (1 sigma) radial precision. Comparisons of the Doppler only and Doppler&GPS computed orbits demonstrate radial accuracy at the 1.5 meter level (1 sigma). Altimeter observations also confirm the 1.5 meter level of radial orbit accuracy. Additionally, great strides have been made in TDRSS related orbit determination, and near comparable results should be possible even without the valuable T/P link. Furthermore, the capability to provide purely GPS derived orbits exists, and with the addition of L2 and phase GPS tracking and an enhanced receiver these orbits could be much improved.
Again, the details of the Shuttle precision orbit determination are documented in [Rowlands et al.], and a copy can be obtained from the authors.
Much of the SLA operations were conducted during intervals spanning the astronaut sleep modes. These are 'quiet' time periods with no orbital maneuvers or attitude mode changes. Five nine hour arcs and one ten hour Shuttle arc were processed spanning these 'quiet' intervals, and accounting for nearly 70% of SLA operations. The arcs are numbered for the SLA observation window they represent. Arc times and attitude mode specifics are given in the SLA data distribution matrix.
During the observational periods processed, the Shuttle was in a -ZLV (Shuttle -Z, cargo bay normal axis, pointed to local vertical) -XVV (Shuttle -X, tail normal axis, pointed in velocity vector direction) Local Vertical Local Horizontal (LVLH) attitude mode. The orientation of the spacecraft remained constant within some attitude 'dead-band'. Four of the observation periods processed were in a 1 degree attitude dead-band, where roll, pitch, and yaw maximum deviation from the aforementioned attitude was +/- 1 degree. Two of the observation periods processed were in a 0.1 degree attitude dead-band.
Quaternion data, acquired using Johnson Space Center's Mission Evaluation Workstation System (MEWS), provides the Shuttle body attitude. This data is used for properly orienting both the antenna-cg offsets for orbit determination measurement modeling, and the SLA line-of-sight for altimeter observation geolocation. The SLA was intended to be mounted such that its line-of-sight was coincident with the Shuttle body -Z axis (cargo bay normal). Therefore, as a first approximation, the line-of-sight is modeled using the Shuttle body attitude quaternions. However, differences in the SLA line-of-sight, from that which is represented by the body quaternions, do exist and are considered attitude errors to be corrected.
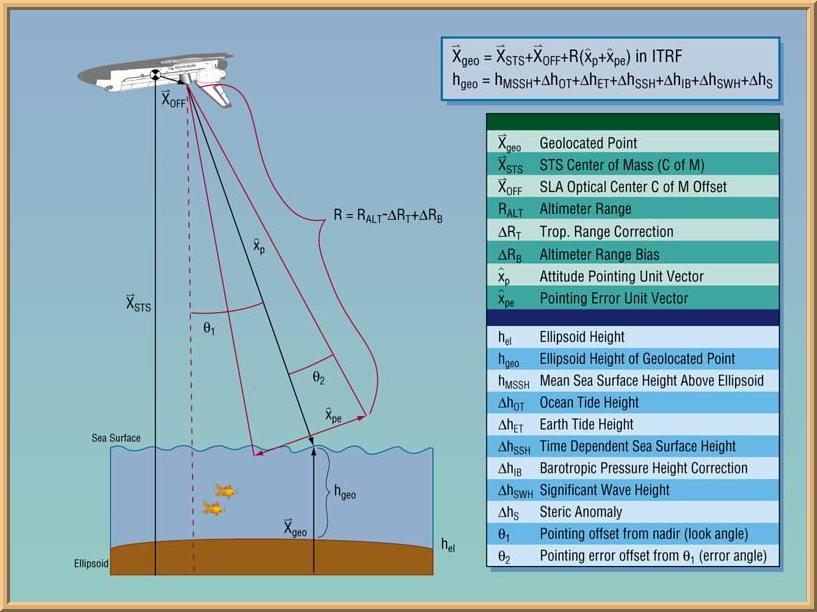
Errors in the SLA pointing are due to many factors including: pointing offset biases from mounting errors, IMU misalignment, and Shuttle body flexure. These pointing errors can cause significant height and horizontal positioning errors in the final geolocation. The resultant height errors are modulated by the a priori Shuttle body attitude assumed. Therefore, for any particular attitude error, the resultant height errors will be significantly larger during 1 degree dead-band modes than during 0.1 degree modes. However, it is considerably easier to both observe and separate the roll and pitch errors during 1 degree dead-band than during 0.1 degree dead-band. Since the attitude offsets can then be estimated from the height error signal, both the resultant height and horizontal positioning errors can be corrected. During the 0.1 degree dead-band modes the height errors are considerably smaller, but large horizontal positioning errors may still exist. Figure 1 below shows the geolocation and ocean surface comparison geometry. Figure 2 below shows the effect of attitude error (modulated by look angle) on both height and horizontal positioning errors using a flat surface approximation.
The SLA observations of the ocean surface have been compared to the Ohio State Mean Sea Surface 95 [Yi] plus the effect of tides computed using the Ray Ocean Altimeter Pathfinder tide model. This first comparison neglects only the smaller contributions from barotropic pressure (<10 cm), earth tides (<20 cm) and the time dependent part of dynamic sea surface heights (<50 cm). During this comparison, large 20 meter height differences from attitude offset errors were observed. For each of the six SLA observation periods processed, a single roll and pitch attitude offset bias correction was estimated using the ocean height comparison. Figure 3 below shows the correlation of attitude height error to body a priori attitude for observation period 7 (OBS 7 v1 comparison), and the improvement obtained from the application of roll and pitch bias corrections (OBS 7 v2 comparison). In addition to the attitude corrections, the geolocation was performed using: T/P consistent reference frames, precise shuttle orbits described above, SLA optical center cg offset correction, altimeter range bias, and the Marini Murray tropospheric refraction correction. This level of processing is the SLA Standard Data Product Version 2 (SDP v2). The ocean height comparison using SLA SDP v2 resulted in a 3.1 meter RMS comparison during 1 degree dead-band observation periods, and a 2.1 meter comparison during 0.1 degree dead-band. Histograms of the ocean height comparisons, for each observation period processed, are provided in the distribution matrix. Simply click on the thumbnail picture. In addition, altimeter observation global distribution maps are also provided in the distribution matrix.
The ocean height comparisons show the SLA SDP v2 data to be at the level of 2-3 meter RMS in height, and horizontal positioning is estimated to be less than 200 meters. It is anticipated that an Enhanced Data Product (EDP) will become available. This SLA EDP will include the processing of all SLA observations including the 30% not yet processed. This 30% requires the processing of Shuttle orbits through significant attitude maneuvers. In addition, the EDP will include the following: (1) IMU alignment attitude correction, (2) attitude/altimeter timing bias correction, (3) improved range bias, (4) improved attitude offset bias, drift, and quadratic estimation, (5) radial orbit positioning improvement from altimetry, (6) improved range from waveform analysis. Also, the SLA geolocated data will undergo an enhanced assessment with the ocean surface including: (1) neglected corrections, (2) cross-over analysis (self, and T/P), (3) T/P altimeter observed heights direct comparison. An enhanced assessment with land topography DEMs will also be performed. Initial results from a proto-EDP are very encouraging with 1.5 meter RMS height and less than 150 meters horizontal position errors. This result can further be improved to an expected level of 1 meter in height and less than 100 meters horizontally.
Responsible NASA official: David Harding